
Khalifa University All-Terrain Hexapod
Position: Design team manager.
Project Duration: 6 Months
Location: Khalifa University, Abu Dhabi, UAE

Problem:
The hexapod couldn't operate due to control and mechanical issues, after inspection we identified the following issues:
Hexapod body to leg ratio is not optimum due to constrained reach.
Leg coxa to femur to tibia ratios is not optimum as it was designed for excavators.
Control was bulky and slow and cant preform synchronous movement or advanced kinematic calculations (PLC based).
Torques required to preform the required movement is extremely high.
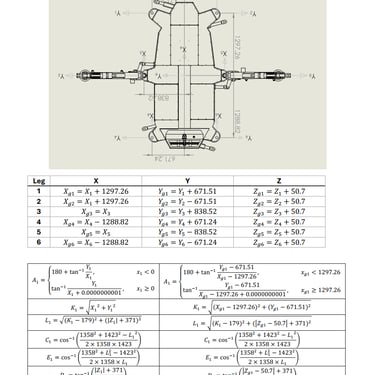
StrugNova collaborated with Khalifa University to redesign its all terrain hexapod robot. The project has been going from 12 years focusing on using gigantic hexapods to navigate hard-to-reach areas for rescue missions. It occupies 6x6 meters area and weighs about 3 tons and capable of carrying 1.5 tons. Its powered by servo motors and made of high strength steel in order to navigate disasters area such as after earthquakes and nuclear disasters. Advanced simulations and calculation were made to reach the best body to leg ratio to reach optimum performance and minimum loads and stresses on the structure.
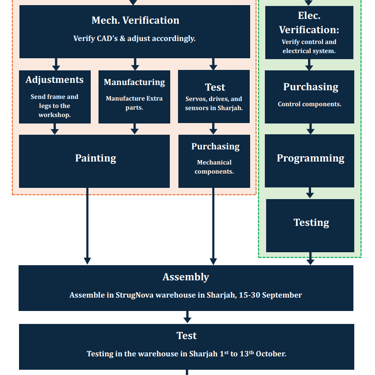
Solution:
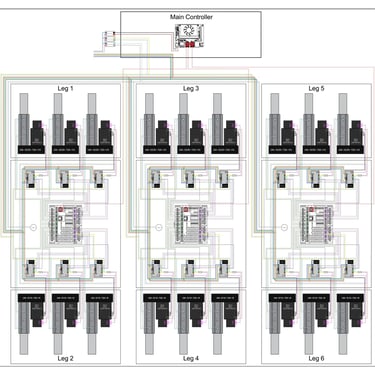
Old PLC control system was abandoned and it was replaced with a microprocessor based controller, that is an ARM architecture based computer controlling 3 small PLCs each controlling 6 servo drives. Replacement allowed the robot to preform complex computations in -almost- real time with a flexibility in programming and control. Also, this change reduced the power required for control by almost 60% and saved 300kg mass in the total.
Femur length was reduced by 30% and femur actuators connection location was changed. These modifications reduced the required torque on the root joint by almost 60% and gave hip joint the range of motion required for optimum operation. Also femur length reduction saved 150 kg in total.
Coxa actuator connection locations was changed on both sides to increase the range of motion and reduce the torque required by almost 40%.
Loads on tibia structure was analyzed and 40% of material was removed, this reduced 180 kg from the total mass.
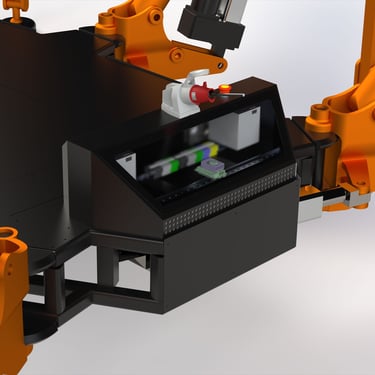
Drives control boxes was moved lower inside the base structure. This change in addition to coxa actuators location change allowed us to lower and centralize the center of mass for more stable and smooth operation.






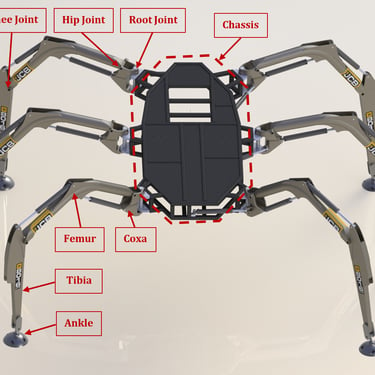


Hexapod before the adjustments.
Hexapod during adjustments.




In IROS 2024.